ターボブレード自社構想 -Project TB-
HEADLINE
<ドローンジェットロケット機「Shinden-Kai」>
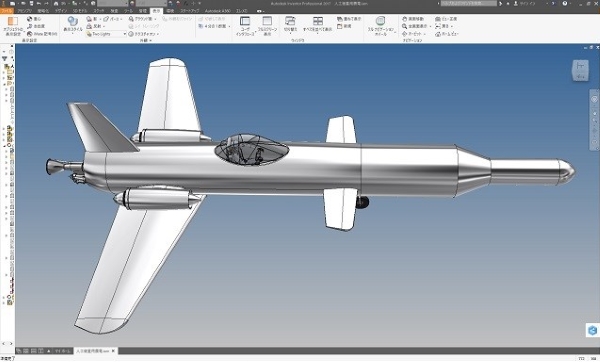
ナノ衛星軌道投入用 Shinden-Kai Nano 構想設計②
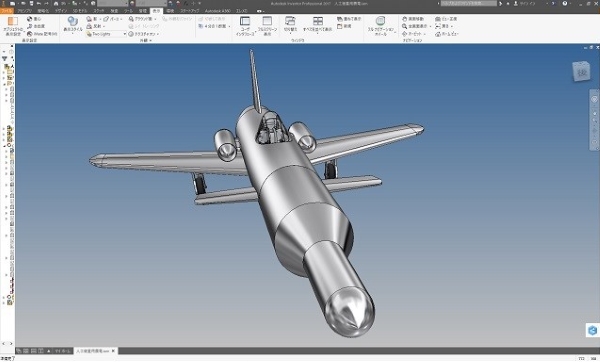
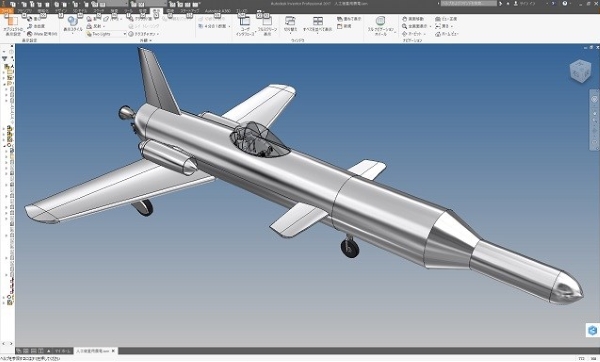
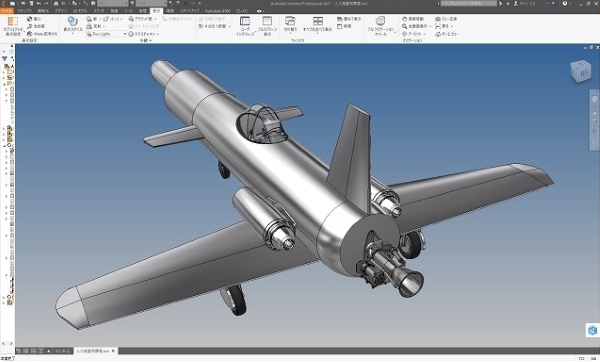
構想設計中のShinden-Kai Nanoに、脚を取付けました。
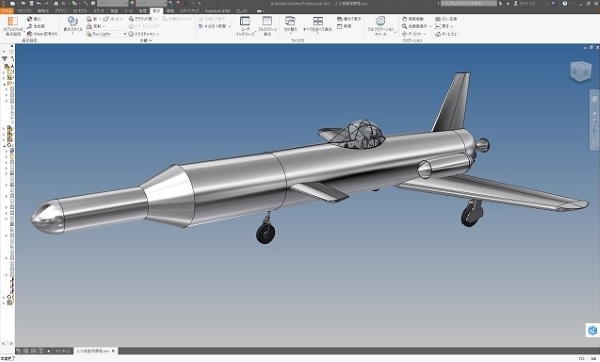
このShinden-Kai Nanoの全体構成は、3段ロケット式となっています。
1段目は、ジェットエンジンと液体ロケットエンジンを搭載した航空機型の帰還可能機体であり、2段目と3段目は使い捨て型の液体ロケットエンジン推進ロケットです。
1段目ジェットロケット機体の操縦はロボットによる自動操縦となり、人が操縦しないためドローン機体となります。
そのため、1段目機体には高度な自動操縦技術が必要であり、それは最近の自動運転技術やドローン制御技術とAIによる判断技術が必要となります。
これはまだ概念構想設計なので、今後は軌道投入までのルートやエネルギー量を概算して、このドローンジェットロケット機の基本設計を確立していきます。